GLIDER Unmanned Ocean Exploration Project 2017
The GLIDER Project forms part of the Norwegian Research Council DEMO2000 and is being managed by Akvaplan-niva, Project Lead, Lionel Camus.

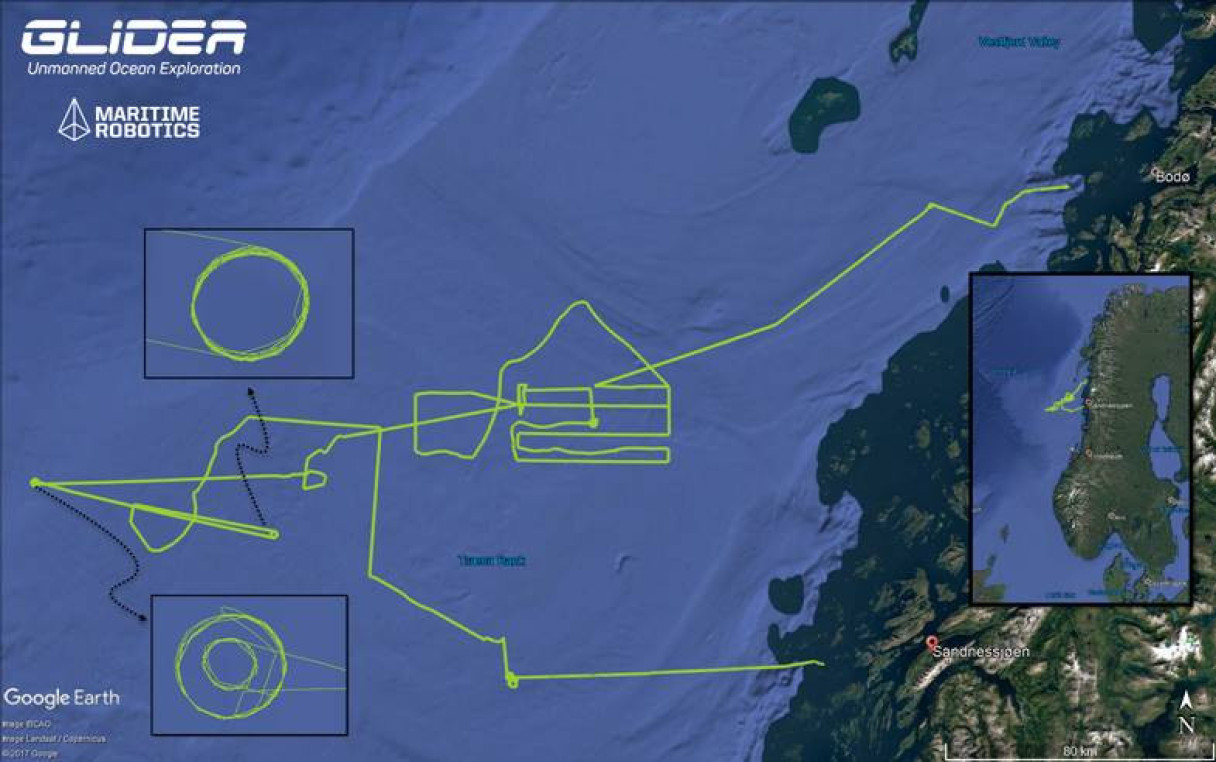
For 35 days in August and September the Maritime Robotics Wave Glider transited over 1700km as part of the GLIDER project. Deployed out of Sandnesjøen, the Wave Glider navigated out 250km offshore onto the shelf and then back to Bodø for recovery, completing navigation mission objectives enroute.
The Wave Glider was fitted with a SIMRAD WBT Mini scientific echo sounder, for fisheries research, as well as a SAIV SD204 instrument, provided by NIVA, to measure sea water conductivity, salinity, temperature, depth (pressure), sound velocity, fluorescence and turbidity.
The following image shows the path the Wave Glider took over the course of the mission and highlights some of the custom watch circles the vehicle maintained with ease. The mission included two periods of marginal weather with average wave heights in excess of 6m.

The overall aim of the GLIDER project is to demonstrate an innovative, flexible and cost-efficient offshore monitoring and data management approach. GLIDER consists in the deployment of 3 ocean autonomous and dynamic platforms, a Seaglider (Kongsberg Maritime AS), a Sailbuoy (Offshore Sensing) and a Wave Glider (Maritime Robotics), fitted with a suite of sensors to collect chemical, physical and biological data of the ocean space. Such an observation program is to collect marine environmental data with improved accuracy, increase sampling of data, provide more flexible sampling of data by using platforms that can move in space, provide long-term and real-time monitoring, and in addition reduce cost compared to other traditional measurement concepts.